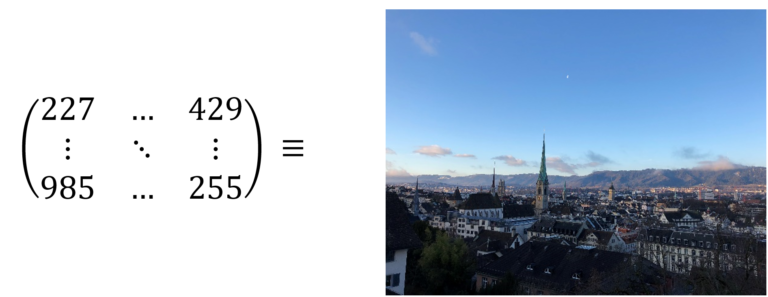
Although these images look vastly different, they represent the same information in different manners. In short: there is more than one way to see an image (and biosignals)!Why is this important and why is it useful to represent biosignals and images in Fourier space instead of real space? It all comes back to the original question we asked at the very beginning of this article: When trying to detect a specific signal, e.g. a molecular interaction, or trying to capture a specific image, how can we detect exactly what we would like to detect, and nothing else? The answer to this is to perform the measurement in Fourier space instead of real space.
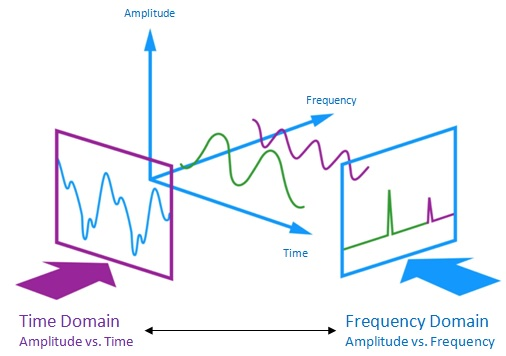
But why? Although analyzing signals and images in real space is much more intuitive, it is much harder to handle the data in this space once it is acquired. As mentioned previously, data acquisition is often faulty, because we can not always optimize how we acquire our data in a way that excludes any unwanted signal. This is particularly difficult with biosignals, because we can not see environmental noise the way we do an image. This is why we must use filters before the data is acquired, unlike applying a filter to a taken image on our smartphones. However, when looking at the signal acquired in the time domain in figure 1 for example, you will notice that filtering out unwanted signal becomes a tedious task. Just by looking at this function, how can we know what parts of it we want, and what parts we don’t want? Moreover, how can we remove those parts across the entire function? Likewise, for the image, how can we filter out the noise and keep the desired information? The truth is, unless we go through the process of trial and error, it is very difficult to do this in real space. However, when looking at the same information in Fourier space, things become much simpler. Looking at figure 2 for instance, in the right image, we see a bright spot in the middle that dims as we get closer to the edge; this means that there is a lot of low-frequency signals (slow or long-ranged) and only few high-frequency signals (fast or short-ranged) in the image. It so happens that noisy signal belongs to low-frequency ranges: knowing this, we can simply filter out the signal in the center of the image, an keep everything else around it. Similarly, with the signal in figure 1, we can remove the signal comprised within the peak appearing at low frequency, and keep the peak at high frequency. Once the filtering is done, we use the inverse Fourier transform to convert the newly filtered data from the Fourier space back into real space, thus obtaining a “clean” signal that we can interpret!
Signals in Surface Plasmon Resonance
At this stage, it may be unclear how this relates to the surface plasmon resonance technology. The aim of SPR is to detect biosignals. Because the signals we want to detect with SPR are mingled with a majority of noise component (environmental noise) we are not interested in, we are faced with the problem described throughout this article: how to detect signal without noise. This is crucial for SPR in particular, as without a robust process to solve this issue, the signal we want to detect gets very easily lost in a sea of noise. In practice, this is what makes SPR so challenging; it is extremely sensitive, but this sensitivity does not discriminate between desired signal and the noise. Indeed, SPR samples its data in real space. Every data point we sample contains noise and the weak signal is diluted over all. In order to get enough of the interesting signal, we need to sample many data points. This means that we acquire monumental amounts of noise.
Still confused? An analogy to put this into perspective.
Imagine you are standing on a standard scale, one you would use to weigh yourself, with a shot glass containing a bit of water. In this analogy, you represent the environmental noise, and the water you pour into the glass represents the signal, i.e. the change you want to detect. If a few drops of water were added to the shot glass, the change in weight would most likely not be detected by the scale you are standing on, as the increment is too small. To detect this change on that scale, it would need to have an extremely high precision (i.e. be able to measure in the gram range) whilst also maintaining a large range of weights (e.g. 0-100kg). If you were to weigh the shot glass alone on a new scale measuring only in the gram-range (e.g. 0-10g) instead of the kilogram range however, the added weight of the water would be detected. Thus, the new scale can detect the changes with higher accuracy. More importantly, the absolute precision required to detect the added water, in this example, 1g, remains the same for both scales; however, when looking at the relative precision of both scales, the smaller scale would show a significant advantage. Indeed, 1g in a measuring range of 10g is much less precise than 1g in a range of 100kg… Surface plasmon resonance is analog to the big scale: it requires extremely high precision to detect signals of interest, whilst also having to sample a very large range of signals.

